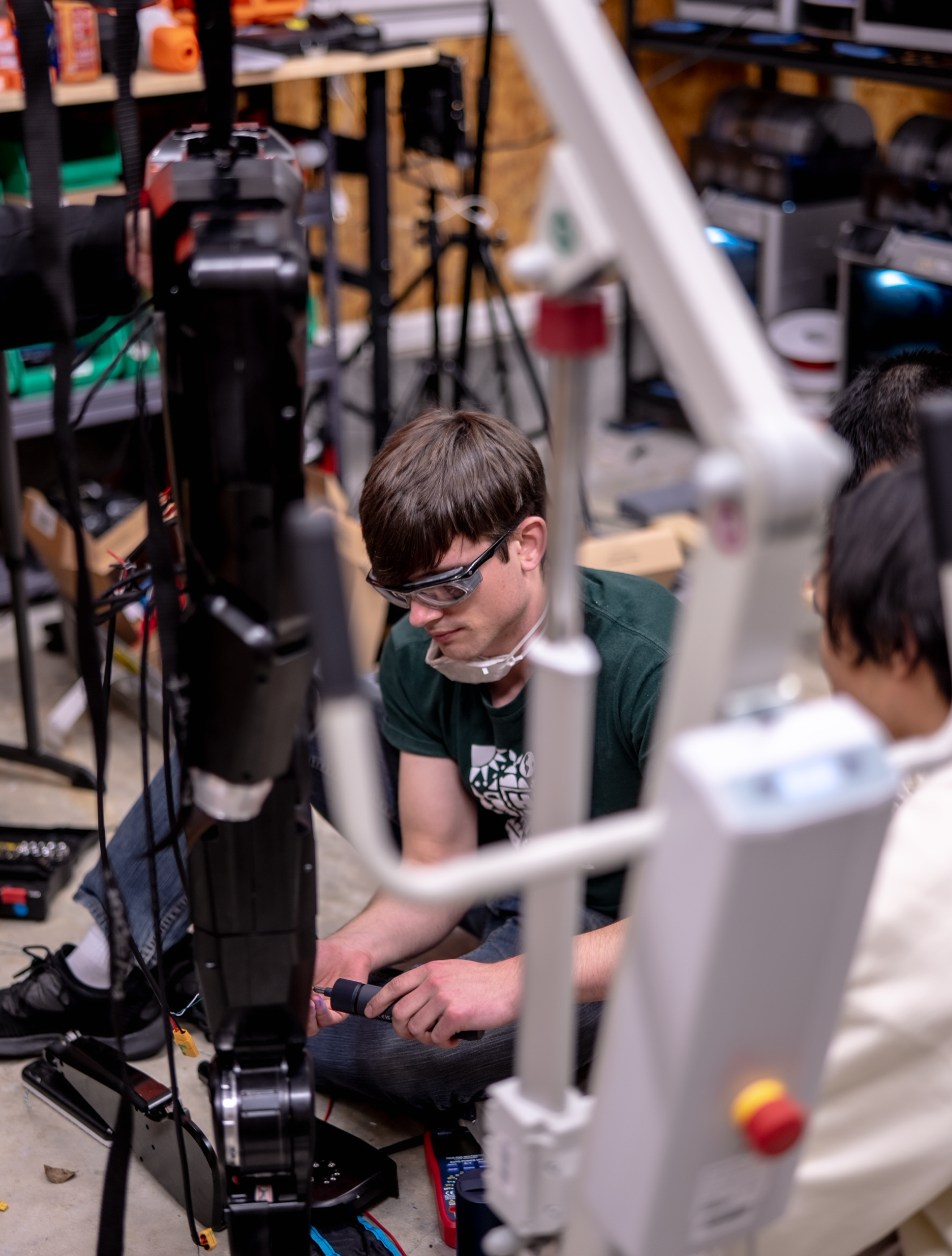
K-Scale Labs
K-Scale KBot
Overall Design Implementation
Within the first two months, led the mechanical design and implementation of the first K-Bot prototype model.
- Primary focus on the limbs design, integrating the full wiring harness and motor array into an existing aesthetic design.
Iterated twice more over the coming months in coordination with the machine learning team and our manufacturing partners.
- Integrating the design into Mujoco environments, identifying and addressing Sim2Real gaps.
- Further reducing weight by 20%, optimizing the design for casting and other mass-manufacturing.
- Constant review and improvement of the assembly design to reduce wiring harness failures and eliminate vibrational failure of joints.
Modular End Effector Mount
Proposed and developed a quick-swap interface for the K-Bot wrist to support rapid integration and testing of various end effectors.
- Leveraged off-the-shelf parts for faster design speed and standardized interface for users.
- Performed real-life testing and FEA optimization of the components and structure for bending load resilience.
Waist Rotation DoF
Designed and Implemented a table-mounted waist degree of freedom in a week to enable manipulation and dexterity development.
- Full sheet-metal construction for production speed.
- Flexure geometry and dog-tooth engagement mechanism to ensure proper load distribution and tolerancing between components.

Partnerships Abroad
Provided the first on-site instruction and quality checks of the K-Bot with our prototyping manufacturing partner in China.
- Direct oversight of their 8-person mechanical engineering team during assembly.
- Enforced the standard bootloading and configuration process, teaching their electrical engineering team the process across the language barrier.
- Achieved a full zero-shot standing and walking deployment within 3 days of parts arriving.
Read the Article

K-Scale ZBot
Entered the design process midway through, serving as the project lead to integrate the electrical and software stack onto the 1-foot robot.
- Integrating the sensor suite onto the robot, physically into the aesthetic design and in coordinating the drivers and tools for the baseline functionality.
- Troubleshooting of communications issues in the servo-driving inference engine.
- Coordination with ML engineers working virtually to test policies and implement functionality onto the hardware.
Projects
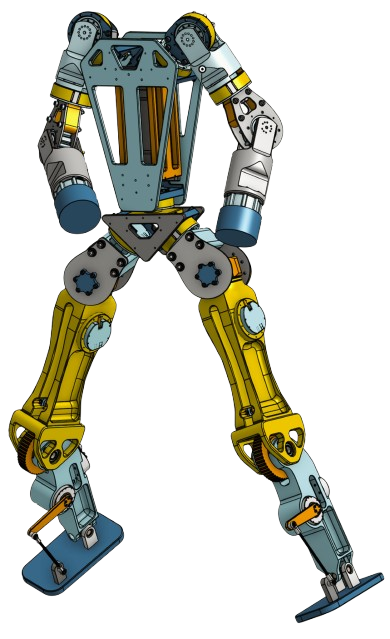
MOHRA Senior Project
Developing a novel humanoid design as a Senior Design project, in coordination with K-Scale Labs.
Focus on consumer-accessible manufacturing methods and thorough documentation of all design decisions and calculations of kinematic requirements.
Available on-line on my Github
Public Gear Design Visualizations
The gearage project — publicly available on my Github.
University Works
See my UniversityPortfolio for clubs and internships!
![]()
General Skills:
- Solidworks, Onshape, MasterCAM, FEA Simulation, Drawings (GD&T)
- Hand Machining, 2D CNC, CNC Milling, 3-D Printing
- Python, Jupyter, VIM, R